


合作客戶/
拜耳公司 |
同濟大學 |
聯合大學 |
美國保潔 |
美國強生 |
瑞士羅氏 |






相關新聞Info
-
> 單片機智能控制的液體表面張力測量儀設計
> 香豆素取代二乙炔LB膜的組裝、聚合及螺旋結構形成機制(中)
> 海藻糖脂:一種兼具優異發泡性能與皮膚溫和性的新型表面活性劑(三)
> 表面活性素制備、分離純化、溶液表面張力測定及膠束化行為研究(二)
> 噴霧液滴的形成原理與配方設計:動態表面張力與粒徑的關系
> 低分子熱塑性樹脂體系CBT500/DBTL的界面張力與溫度的關聯性(一)
> 氣凝膠的合成方法及干燥方法一覽
> 聚氧乙烯鏈長度調控非離子Gemini表面活性劑的表面張力、接觸角(三)
> SuperG超微量天平工作原理、特點、參數、操作方法
> 氨基改性硅油柔軟劑的表面張力、透水率、分層測試(二)
推薦新聞Info
-
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(四)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(三)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(二)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(一)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(三)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(二)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(一)
> 可逆pH調控的納米復合稠油降黏劑:從高效乳化到快速油水分離(三)
> 可逆pH調控的納米復合稠油降黏劑:從高效乳化到快速油水分離(二)
> 可逆pH調控的納米復合稠油降黏劑:從高效乳化到快速油水分離(一)
基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(二)
來源:化工進展 瀏覽 5 次 發布時間:2026-03-02
1 數值計算方法
濕顆粒碰撞過程的直接數值模擬通過流體體積模型(volume of fluid,VOF)模型追蹤氣液界面,連續表面張力模型(continuum surface force,CSF)模型計算界面的表面張力,兩者共同作用,控制液膜的形變過程。顆粒運動則采用六自由度模型(six degrees of freedom,6 DOF)結合重疊網格技術進行描述,為了模擬顆粒的反彈運動并提取分析數據,本文開發并應用了用戶自定義函數。
1.1 VOF模型
采用VOF模型來模擬氣液兩相流體的流動問題,通過求解體積分數的對流方程實現相界面的瞬態追蹤。在VOF模型中,通過跟蹤不同相的體積分數來描述不同相的位置和界面形狀[式(1)]。
?α?t+??(αu)=0(1)
式中,α為液體的體積分數,%,α=1處的網格充滿液體,α=0處的網格充滿氣體,0<α<1的網格區域含有自由面;t為時間,s;u為流體的速度矢量,m/s;?為梯度算子。
假設流體為不可壓縮流體,且氣液兩相的密度保持不變,涉及質量與動量守恒。
連續性方程為式(2)。
??u=0(2)
動量方程為式(3)。
?(ρu)?t+u??(ρu)=-?p+??[μ?(?u+?uT)]+g+FSV(3)
式中,ρ為流體的局部平均密度,kg/m3;p為流體的壓力,Pa;μ為動力黏度,Pa·s;g為流體自身重力,N;FSV為表面張力的等價體積力,N。
局部平均密度ρ和動力黏度μ表達式為式(4)和式(5)。
ρ=αρl+(1-α)ρg(4)
μ=αμl+(1-α)μg(5)
式中,下角標l為液體相;下角標g為氣體相。
1.2 連續表面張力模型
連續表面張力模型能夠將液體界面上的力轉換為周圍的體積內連續分布的力,被廣泛應用于液滴流動模擬中。界面處表面張力可以表示為式(6)。
Fsf=σκ?φ(6)
式中,Fsf為表面張力,N;σ為表面張力系數;?φ為界面切向的梯度算子;κ為表面曲率。
界面處的單位法向量計算如式(7)、式(8)。
n=-?φ|?φ|(7)
n=nwcosθ+twcosθ(8)
式中,θ為氣-液界面在壁面處的接觸角,(°);nw和tw分別為與壁面法向和切向的單位向量。得到界面的曲率為式(9)。
κ=???φ|?φ|(9)
1.3 顆粒運動模型
控制顆粒運動位移的方程為式(10)。
dupdt=1mpFp+Fv+Fsf+Fg(10)
式中,Fp為壓差阻力,N;Fv為黏性阻力,N;Fg為重力,N;mp為顆粒質量,kg;up為顆粒速度,m/s。
為進一步分析濕顆粒碰撞過程中的能量損失,可以將其分為以下四部分:壓差阻力引起的能量損失比Ep、黏性阻力引起的能量損失比Ev、由濕顆粒間非完全彈性碰撞引起的能量損失比Ec、由表面張力引起的動能耗損比Esf。并將顆粒1剛接觸液膜時刻的初始動能定義為E0。計算見式(11)~式(13)。
Ep=(∫h0htFpdh+∫hthmFpdh)/E0Fp=-∫Spiz?ndS(11)
Ev=(∫h0htFvdh+∫hthmFvdh)/E0Fv=μ∫S?uz?ndS(12)
Ec=(12mut2-12mus2)/E0(13)
式中,h0為顆粒1接觸液膜時質心高度,μm;ht為顆粒1與顆粒2碰撞時質心高度,μm;hm為顆粒1碰撞后反彈到最高點的質心高度,μm;ut為顆粒1碰撞前的速度,m/s;us為顆粒1碰撞后的速度,m/s。
1.4 重疊網格
本文使用的重疊網格方法廣泛應用于模擬移動網格的邊界運動問題。重疊網格技術的工作原理包括挖孔、重疊最小化和供體搜索。首先,生成互不約束的背景網格和重疊網格,滿足N-S求解器的三階離散化。在求解的迭代過程中,流場數據通過內嵌邊界進行傳輸。其次,確定執行各自職責的單元,包括挖孔單元、重疊邊界單元(接收單元)和計算單元(供體單元)。挖孔單元是指通過挖掘操作丟棄的一些煩瑣單元。重疊邊界單元主要圍繞挖孔單元,并被視為每個重疊網格中的邊界。重疊邊界單元與計算單元之間的關系通過插值確定。具體實現流程如圖1所示。
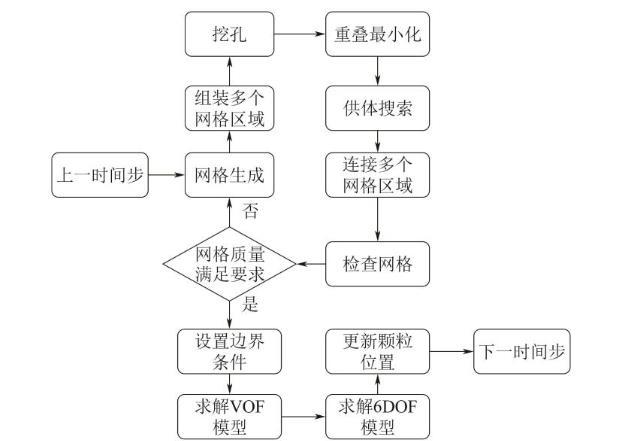
圖1 重疊網格計算求解流程